Raspberry Pi – Camera Module + Motion
- 12 minutes read - 2545 wordsIn deze tutorial leg ik uit hoe je de Raspberry Pi kunt opzetten / configureren met de Camera Module. Deze module is niet standaard inbegrepen bij aanschaf van de Raspberry Pi.
Ik leg ook uit welke software je het beste kunt gebruiken voor het detecteren van beweging. Verder bespreek ik stap voor stap hoe je het beste je netwerk kunt configureren. Ik sluit af met een lijstje met handige commando’s die je zeker gaan helpen tijdens het project.
Kortom, een mooi projectje voor in het weekend! 🙂
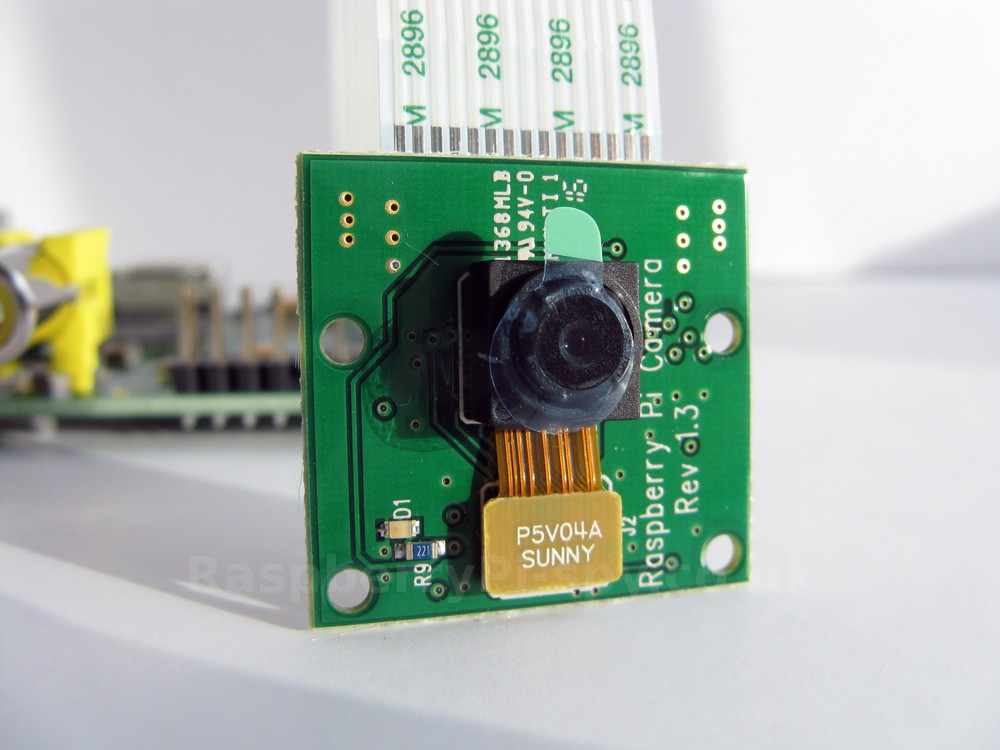
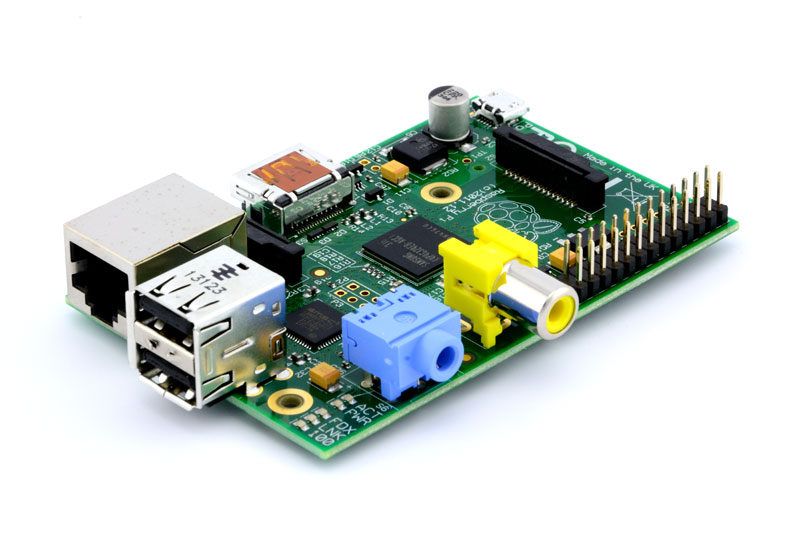
Note: In deze tutorial ga ik er vanuit dat er basis Linux kennis aanwezig is en je al beschikt over de nodige hardware (zie Raspberry Pi op de foto rechts). Plus het aansluiten van deze hardware. Mocht je daarover echter toch nog vragen hebben, laat dan gewoon een reactie achter en ik help je graag verder!
Raspbian Installeren
We beginnen met het downloaden van de Raspbian image (Torrent is het snelste): Ga naar Download site.
Kies voor “Raspbian” onderaan de webpagina (NOOBS mag ook, maar die keuze laat ik bij jou liggen). In deze tutorial ga ik de Debian versie voor Raspberry Pi gebruiken (ook wel Raspbian).
![]()
.img bestand.
Optie #1 - Handmatig installatie
Open Gparted (sudo apt-get install gparted). En controleer welke harde schrijven er allemaal zijn. Doe nu de SD kaart in je computer en start Gparted opnieuw op, als het goed is, is er nu een extra sdxxx erbij gekomen (deze kan echter ook anders beginnen qua naamgeving). Verwijder eventuele partities van de SD kaart via Gparted. Je moet er zeker van zijn dat er geen partities aangekoppeld/gemount zijn.
Ga naar de map waar je .img bestand is. En open hier een Terminal. Voer daarna het volgende opdracht uit om de image (.img) te schrijven naar je SD kaart: sudo dd bs=4M if=201x-xx-xx-wheezy-raspbian.img of=/dev/sdxxx
Veranderd sdxxx naar het apparaat wat je SD kaart moet zijn. Zet er geen getal achter, want dat verwijst naar een partitie, in dit geval moet de image naar z"n volledige opslag geschreven worden. Mocht dit nu niet werken, kun je altijd een kleine block size (bs) gebruiken, echter dit zorgt er wel voor dat het langer duurt voordat de image op je SD kaart staat.
Optie #2 - Automatisch via script
Een alternatief is door gebruik te maken van mijn eigen installatie script, zie: install_raspbian.sh. Dit script is onderdeel van de Linux Script repo op Gihub.com, onderdeel van Melroy’s Blog account.
Sla dit bestand op dezelfde locatie op als waar je download staat. En maakt deze uitvoerbaar via: sudo chmod +x install_raspbian.sh
En voer het uit: ./install_raspbian.sh
Eerste keer opstarten
Steek je SD kaart vervolgens in je Raspberry Pi en zet de stroom erop. Als je eenmaal door de installatie bent gelopen log dan in met de gebruiker “pi” en jouw gekozen wachtwoord.
Om te beginnen gaan we het netwerk aanpassen, zodat je een statisch IP adres toegewezen krijgt. Dit kan door het volgende bestand aan te passen: sudo nano /etc/network/interfaces
Verander eth0 interface naar:
allow-hotplug eth0
iface eth0 inet static
address 192.168.0.80
netmask 255.255.255.0
network 192.168.0.0
broadcast 192.168.0.255
gateway 192.168.0.1
Sla het bestand op (via ctrl+x), type daarna: “y” en druk op enter. Zoals beschreven staat in de Debian handleiding zorgt de allow-hotplug regel ervoor, dat ifup de eth0 interface opbrengt, en iface regel zorgt ervoor dat ifup het statische IP adres gebruikt bij het configureren van de interface.
We gaan hier vanuit dat de resolvconf pakket geïnstalleerd is, dit zorgt ervoor dat DNS instellingen automatisch doorgevoerd wordt (anders zou je het bestand /etc/revolv.conf moeten aanpassen; enkel “nameserver” is verplicht). Zie DNS hoofdstuk later in het artikel.
Herstart eth0 interface via:
sudo ifdown eth0
sudo ifup eth0
Controleren van de netwerk instellingen kan met ifconfig commando (zonder parameters).
Vanwege het feit dat je enkel 1 ethernet connector heb op de Raspberry Pi hoeft ook enkel die gecontrolleerd te worden door de ifplugd service als er een kabel ingeplugged wordt. Vandaar dat we auto veranderen naar eth0. Dit veranderen in verband met eventuele toekomstige problemen als je ooit bijvoorbeeld een wifi dongle wilt aansluiten (wlan0 interface).
sudo nano /etc/default/ifplugd
Verander auto naar eth0. Sla wederom het bestand op.
We updaten het huidige systeem, zodat alles up-to-date is:
sudo apt-get update
sudo apt-get upgrade
Als je dat nog niet gedaan heb, gaan we de camera module “activeren” via de Raspberry Pi commando: sudo raspi-config
Kies “Enable Camera”. Selecteer “Enable” en druk daarna op enter. Selecteer vervolgens Finish. Nu reboot de Raspberry Pi zichzelf als het goed is. En anders type je om te herstarten: sudo reboot
TIP!
SSH (Secure Shell) is standaard actief*,* via SSH kun je de Raspberry Pi over afstand overnemen. Dit kan op je computer via het commando: ssh pi@192.168.0.80
En vervolgens voer je je wachtwoord in. Nu zit je “remote” in je Raspberry Pi terminal!
Camera check
Als je de Raspberry Pi camera nog niet aangesloten heb, doe dat nu.
UPDATE: We gaan het volgende bestand uitbreiden met een kernel module, hierdoor wordt de camera gezien als een “normale” camera onder Linux (net als een webcam): sudo nano /etc/modules
Voeg deze regel toe aan het einde: bcm2835-v4l2
Dit zorgt ervoor dat GNU/Linux voortaan deze module automatisch start bij het opstarten. Voor nu starten we het eenmaal handmatig op: sudo modprobe bcm2835-v4l2
We kunnen nu controleren op de camera überhaupt werkt via: raspistill -o test.jpg
Dit zou een foto moeten maken en opslaan onder de naam test.jpg: ls /dev/
Dit commando moet nu een lijst geven, waaronder video0, je kunt nu doorgaan met het artikel. Als je geen video0 ziet, controleer dan a.u.b. opnieuw de camera aansluiting en/of je de module wel goed hebt ingeladen.
Installeer het volgende pakket voordat je avconv commando kunt gebruiken: sudo apt-get install libav-tools
Neem een video op om te testen: avconv -f video4linux2 -r 25 -i /dev/video0 -vcodec mpeg4 -y webcam.mp4

Motion Software
Nu gaan we Motion software installeren, deze software gaat straks beweging detecteren door middel van de camera beelden, installeren doen we via: sudo apt-get install motion
Klaar 🙂!
Motion Web-interface
Nu kun je schermopnames of een video maken wanneer motion beweging detecteert en deze naar een bepaalde map plaatsen. Maar het kan ook handig zijn om live het beeld te zien en een online configuratie interface, dat kan met MotionEye. Sinds versie 0.27 is MotionEye voortaan op github te vinden.
We beginnen met de multimedia repository toe te voegen aan APT. Log eerst in als root gebruiker: su -
En dan:
echo "deb http://www.deb-multimedia.org jessie main non-free" >> /etc/apt/sources.list
apt-get update
apt-get install deb-multimedia-keyring
En uiteindelijk nogmaals een update na de keyring installatie: sudo apt-get update
Voordat we verder gaan, installeren we eerst de afhankelijkheden voor MotionEye: sudo apt-get install python-pip python-dev libssl-dev libcurl4-openssl-dev libjpeg-dev ffmpeg v4l-utils
Nu we Python-pip hebben, wordt de installatie eenvoudiger. Python pip helpt je met installeren van python pakketten. We gaan nu motioneye installeren: sudo pip install motioneye
De laatste versie is nu v0.28.3. MotionEye is aanwezig in de Python pip repository. In mijn tutorial ga ik er vanuit MotionEye geïnstalleerd wordt via python pip.
Mocht je echt de laatste “unstable” versie willen hebben, dan kun je de github repo clonen:
git clone https://github.com/ccrisan/motioneye.git
Configureren
MotionEye maakt gebruik van een motioneye.conf file. Creëert de correcte map: sudo mkdir -p /etc/motioneye
Zet het voorbeeld configuratie bestand naar de nieuwe map: sudo cp /usr/local/share/motioneye/extra/motioneye.conf.sample /etc/motioneye/motioneye.conf
Mocht je niet over dit motioneye.conf.sample bestand beschikken, probeer deze versie direct van github.com. Het configuratie bestand bewerken kan via: sudo nano /etc/motioneye/motioneye.conf
Optioneel kun je de poort veranderen naar poort 80. Ik vind het gewoon fijn om het IP-adres in te vullen in de webbrowser zonder na te denken welke poort het ook alweer was: port 80
Maak de standaard media map aan (waar de fotos/videos terecht komen): sudo mkdir -p /var/lib/motioneye
Tot slot maken we gebruik van het meegeleverde systemd opstart-script, die het opstarten vereenvoudigd. Systemd is de nieuwste opstartbeheerder van Debian 8 Jessie.
cp /usr/local/share/motioneye/extra/motioneye.systemd-unit-local /etc/systemd/system/motioneye.service
Mocht je op een of andere manier niet over dit systemd init script beschrikken, ook dit bestand kun je vinden op Github. Dit init script maakt standaard gebruik van /etc/motioneye/motioneye.conf configuratie bestand.
Voeg motioneye toe aan system control:
sudo systemctl daemon-reload
sudo systemctl enable motioneye
Zonder reboot kun je MotionEye starten via: sudo systemctl start motioneye
Stoppen kan weer via: sudo systemctl stop motioneye
Als alles goed is gedaan, kun je nu verbinden met de MotionEye webserver via: http://localhost.
Of remote, via je eigen PC bijvoorbeeld, ga dan naar (verander eventueel het IP adres naar de gene die jij gebruikt hebt):
http://192.168.0.80
Hij zou vragen om een nieuwe camera te configureren, druk op de link voor het toevoegen van een camera. En selecteer de camera, waarschijnlijk iets met “mmal”. Als het goed is heb je nu live beeld!
WiFi Dongle
Je kunt je Raspberry Pi uiteraard aansluiten op het netwerk, handig om je opnames op te slaan op een netwerk schrijf. De Raspberry Pi Model B beschikt over een LAN ethernet poort, waardoor je het op een bekabelt netwerk kunt aansluiten. Echter in deze situatie is het verstandiger om gebruik te maken van draadloze netwerk verbinding door gebruik te maken van een WiFi Dongle.
Het is verstandig om te kiezen voor een WiFi Dongle die “out-of-the-box” werkt, kortom dat je hier geen extra handelingen voor moet doen. Op deze pagina kun je een overzicht vinden van alle dongles die al dan wel of niet goed ondersteund worden door Raspberry Pi (Raspbian).
Ik heb een losstaand artikel geschreven waarin ik stap voor stap uitleg hoe je je eigen WiFi driver kunt compileren en gebruiken voor Raspberry Pi. Dit behandel ik daarom verder niet meer in dit artikel.
WiFi Configureren
In Linux kunnen we WPA supplicant gebruiken voor het opgeven van de wifi instellingen.
Wijzig hiervoor het volgende configuratie bestand: sudo nano /etc/wpa_supplicant/wpa_supplicant.conf
Met als inhoudt nu:
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
ap_scan=1
network={
ssid="JOUW_WIFI"
psk="WACHTWOORD"
proto=RSN
key_mgmt=WPA-PSK
pairwise=CCMP TKIP
group=CCMP TKIP
auth_alg=OPEN
}
Ps. Je kunt MotionEye configuratie aanpassen, zodat je de WiFi instellingen ook via MotionEye kan veranderen.
sudo nano /etc/motioneye/motioneye.conf
Verander de regel met wpa_supplicant_conf naar (vergeet niet het #-teken te verwijderen): wpa_supplicant_conf /etc/wpa_supplicant/wpa_supplicant.conf
Korte uitleg van mogelijke configuratie items in wpa_supplicant.conf bestand:
update_config(optioneel): indien op 1, dan is het mogelijk om de wifi instellingen te veranderen via grafische interfaceap_scan: 0 wordt enkel voor bekabelde verbindingen gebruikt. Zoals nu op 1, is het standaard voor wifi. En 2 wordt enkel gebruikt wanneer voor drivers te zetten met SSID, die niet goed raad weten met wpa_supplicant (developer / crappy drivers).ssid: de naam van je WiFipsk: het wachtwoord van je WiFi netwerkscan_ssid(optioneel): zeer waarschijnlijk 1 (voor normale netwerken) of 2 voor verborgen netwerken.proto: kan zijn RSN (Robust Security Network: WPA2) of WPA (WPA1).key_mgmt: kan zijn WPA-PSK (zeer waarschijnlijk) of WPA-EAP (enterprise netwerken).pairwise: kan zijn CCMP (WPA2) of TKIP (WPA1).auth_alg(optioneel): is waarschijnlijk OPEN (nodig voor WPA/WPA2), andere opties zijn LEAP en SHARED.group: kun je zetten op CCMP (WPA2), TKIP (WPA1), WEP104 of WEP40.priority(optioneel): hoe hoger het getal hoe meer wenselijk dit netwerk is om te gebruiken.
Zet de rechten goed, immers wpa_supplicant.conf bevat gevoelige informatie: sudo chmod 600 /etc/wpa_supplicant/wpa_supplicant.conf
Je zou de Raspberry Pi een statisch (vast) IP-adres kunnen meegeven voor het volgende bestand aan te passen: sudo nano /etc/network/interfaces
Met als inhoud:
auto lo
auto wlan0
iface lo inet loopback
iface eth0 inet dhcp
allow-hotplug wlan0
iface wlan0 inet static
address 192.168.0.80
netmask 255.255.255.0
network 192.168.0.0
broadcast 192.168.0.255
gateway 192.168.0.1
wpa-conf /etc/wpa_supplicant/wpa_supplicant.conf
iface default inet dhcp
Let op!
Dat je wpa-config gebruikt en niet wpa-roam.
Als je ook een eth0 interface hebt geconfigureerd als een statisch IP-adres… Dan moet je de gateway regel bij wlan0 verwijderen, anders krijg je een foutmelding.
UPDATE: Om problemen te voorkomen met DHCP, verwijderen we wlan0 uit de “link detection daemon”. Daarvoor wijzigen we het volgende bestand: sudo nano /etc/default/ifplugd
Verander “auto” en “all” naar “eth0”:
INTERFACES="eth0"
HOTPLUG_INTERFACES="eth0"
ARGS="-q -f -u0 -d10 -w -I"
SUSPEND_ACTION="stop"
Control+X, en sla het bestand wederom op.
Crontab (Optioneel)
NIEUW: Eventueel kun je een zogenaamde “crontab” script schrijven, die elke x minuten controleert of de WiFi verbinding niet verbroken is. En anders opnieuw verbinding probeert te maken (just to be sure). Script genaamd check_wifi.sh:
#!/bin/bash
if iwconfig wlan0 | grep -q "Melroy_Dennis_HQ" ; then
:
else
echo "Network connection down! Attempting reconnection."
ifdown --force wlan0
sleep 5
ifup wlan0
fi
Uitvoerbaar maken met: chmod +x check_wifi.sh
En als laatste toevoegen aan crontab (e van edit): crontab -e
Elke 30 minuten controleren: */30 * * * * /home/pi/check_wifi.sh
DNS (Optioneel)
Optioneel kun je OpenDNS gebruiken. Veranderd het resolv.conf bestand: sudo nano /etc/resolv.conf
En voeg of vervang de volgende regel toe aan dit bestand (voor OpenDNS): nameserver 208.67.222.222
En sla het bestand op. Op dit moment is OpenDNS altijd geconfigureerde als eerste DNS server, ongeacht welk netwerk interface je gebruikt.
Handige Commando’s
Indien je informatie wilt opvragen over de interface kunt je gebruik maken van (of het achterhaalde commando ifconfig): ip addr
Zodra je twee interfaces heb gedefinieerd, dan kun je de netwerken herstarten op je Pi zelf via:
sudo service networking stop
sudo service networking start
Gebruik liever geen networking restart, dit kan problemen opleveren met het opbrengen van de interface en is daarom achterhaald. Let er op dat je verbinding verliest mocht je via SSH verzonden zijn.
Je kunt ook per interface “opbrengen” via:
sudo ifdown eth0
sudo ifup eth0
Vraag je je af welke WiFi access points er in de buurt zijn, gebruik: sudo iwlist wlan0 scan
Wilt je controleren of je nu echt bent verbonden bent met je WiFi Access Point? Maak handig gebruik van het iwconfig commando:
sudo iwconfig 2>&1 | grep ESSID
wlan0 IEEE 802.11bgn ESSID:"Melroy_Dennis_HQ" Nickname:"rtl_wifi"
Controleer je IP route table via het route commando. Let er dus op dat je standaard gateway verwijst naar 0.0.0.0 en die verwijst weer naar de router met het IP-adres 192.168.0.1:
route -n
Kernel IP routing table
Destination Gateway Genmask Flags Metric Ref Use Iface
0.0.0.0 192.168.0.1 0.0.0.0 UG 0 0 0 wlan0
192.168.0.0 0.0.0.0 255.255.255.0 U 0 0 0 wlan0
Wil je testen of je google.com kunt bereiken? Probeer het domeinnaam te pingen:
ping google.com
PING google.com (173.194.65.101) 56(84) bytes of data.
64 bytes from ee-in-f101.1e100.net (173.194.65.101): icmp_req=1 ttl=48 time=14.4 ms
64 bytes from ee-in-f101.1e100.net (173.194.65.101): icmp_req=2 ttl=48 time=18.9 ms
Mocht je tegen problemen aanlopen, probeer eens te kijken in het /var/log/syslog bestand, via:
tail -f /var/log/syslog
Jul 27 22:21:14 raspcam wpa_supplicant[3626]: wlan0: Trying to associate with c0:3f:0e:be:bb:2c (SSID='Melroy_Dennis_HQ' freq=2437 MHz)
Jul 27 22:21:14 raspcam wpa_supplicant[3626]: wlan0: Association request to the driver failed
Jul 27 22:21:15 raspcam kernel: [ 1844.563776] r8712u 1-1.2:1.0 wlan0: r8712_got_addbareq_event_callback: mac = c0:3f:0e:be:bb:2c, seq = 0, tid = 0
Jul 27 22:21:15 raspcam wpa_supplicant[3626]: wlan0: Associated with c0:3f:0e:be:bb:2c
Jul 27 22:21:15 raspcam wpa_supplicant[3626]: wlan0: WPA: Key negotiation completed with c0:3f:0e:be:bb:2c [PTK=CCMP GTK=TKIP]
Jul 27 22:21:15 raspcam wpa_supplicant[3626]: wlan0: CTRL-EVENT-CONNECTED - Connection to c0:3f:0e:be:bb:2c completed (auth) [id=0 id_str=]
Jul 27 22:21:15 raspcam ifplugd(wlan0)[3606]: Link beat detected.
Jul 27 22:21:15 raspcam ifplugd(wlan0)[3606]: Executing '/etc/ifplugd/ifplugd.action wlan0 up'.
Jul 27 22:21:15 raspcam ifplugd(wlan0)[3606]: client: /sbin/ifup: interface wlan0 already configured
Jul 27 22:21:15 raspcam ifplugd(wlan0)[3606]: Program executed successfully.